![]()
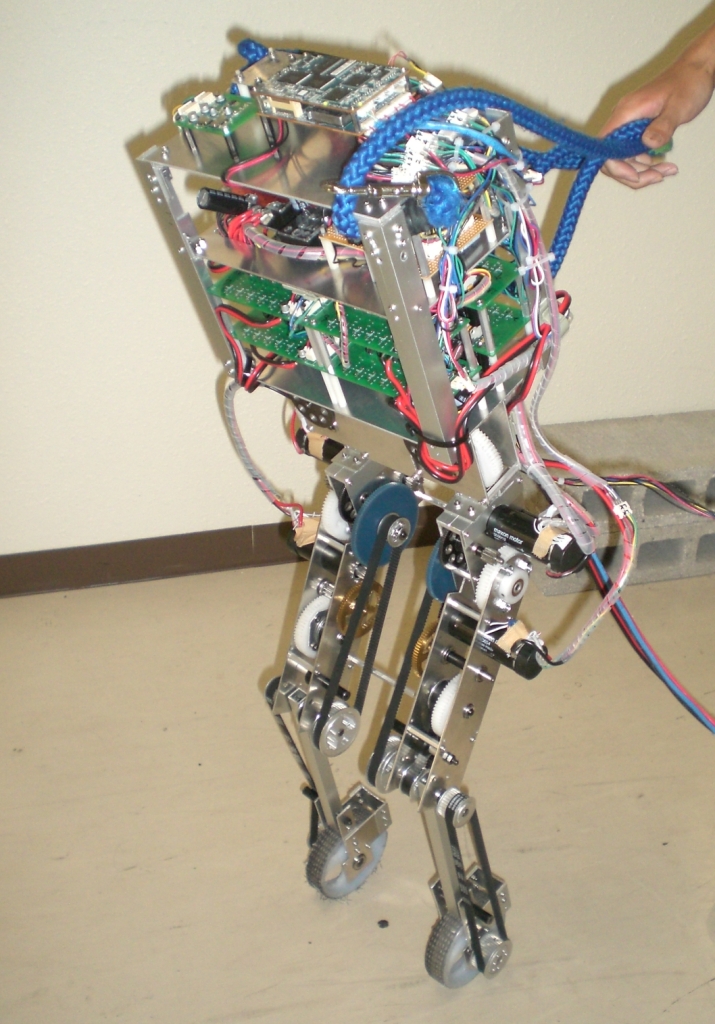
| 現在、ASIMO、PETMANなど人のように歩行移動するヒューマノイドロボットの研究は盛んに行われている。しかしながら、人の脚移動は人間のアクチュエータである筋肉を用いてこそ最適なエネルギー効率で移動できるように最適化された方式であろう。よって、現存するアクチュエータを用いるならばそれに適した移動方式を目指すべきと考える。 しかしながら、一方でヒューマノイドの直立移動は移動面積をとらず、また、人と同じ高さの上半身や目線を持てば、既存の人のために整備された環境には溶け込みやすいと考えるので、有用であると思われる。 そこで、本研究では、平地や緩やかな不整地では機械にとって最も優れた移動方式であろう車輪移動を適用し、一方で段差や階段などでは人のように歩く、ハイブリッド型直立移動方式を適用したヒューマノイドロボットを開発する。 |