TOP
RESEARCH
MEMBER
ARCHIVES
OTHERS
除脳猫ロボット・シミュレーション
──4足動物の歩容遷移現象のシミュレーションモデルおよびロボットを用いた解明,および真に動物らしいロボットの開発
近年、人のように賢く、人や動物のように動くロボットが多く開発されています. ただ、それらの知能(AI)と運動制御は実は生物のそれとは異なり、ロボット特有のAIと制御手法を用いています. よって,生物らしいロボットを作るのにもいずれ限界が来るでしょう. そこで,福岡研では,生物の脳神経系を忠実に搭載したロボットの実現を目指しています. その初期段階として,ロボットの歩行走行運動を動物を模した忠実な神経系で実現することを目標としています. 除脳された猫(除脳猫)でも歩行走行可能なことが生物学上明らかになっています。これは動物の脊髄にCentral Pattern Generator (CPG) と呼ばれる神経回路が存在し,それが歩行走行制御の基礎をになっているからだといわれています. 福岡研では,CPGに基づくプログラム4足動物シミュレーションモデルや4足ロボットに適用することで,脚を動かす複数のパターンが本当の動物のように速度にあわせて遷移することを実証しました. 実は,そのパターンは一つだけしかプログラムしてなかったのですが,それ以外の動物に出現するパターン約6種が自律的に出現しました. このことから,CPGを搭載した除脳猫ロボットは妥当な神経モデルを構築していると考えられます.また,生物学上でもいまだ不明な動物の歩行走行パターン出現原理の解明にも一躍かっています. プログラムしてなかった現象が出現したというのはロボットの新しい人工知能の基盤の提案とも言えるかも?
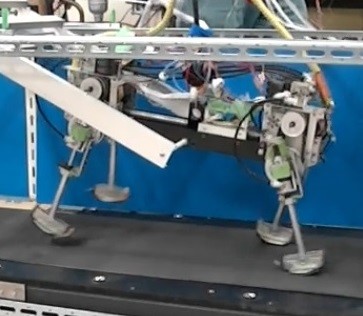
spinal-bot実機
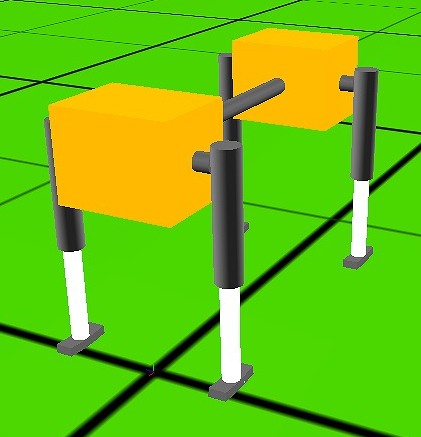
spinal-botシミュレーションモデル
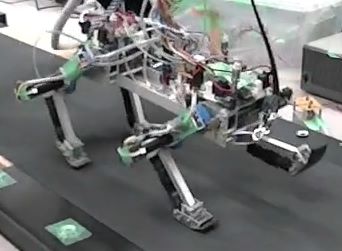
tekkenR実機
This page has been developed by Fukuoka laboratory.